






loading...
Nel loro articolo pubblicato oggi su Science Robotics, il team documenta le basi che ha intrapreso e, sebbene sia ancora estremamente limitato, suggerisce come questo tipo di versatilità sarà raggiunto in futuro.
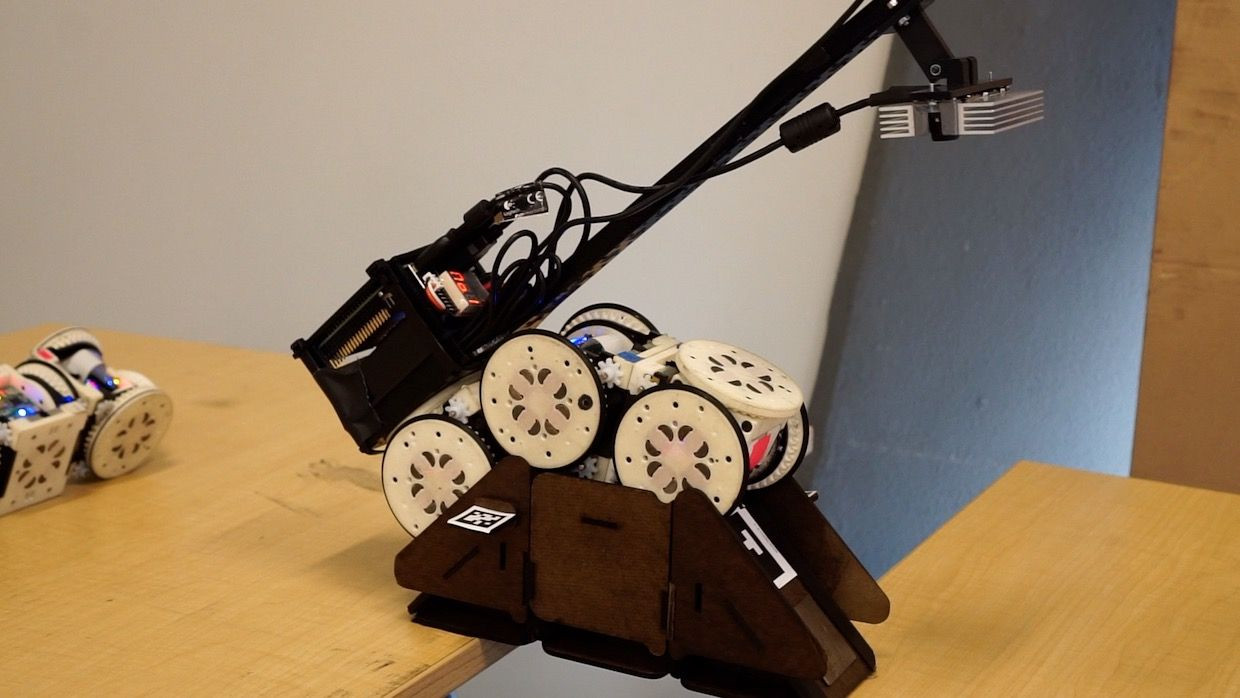
Il robot stesso, chiamato SMORES-EP, potrebbe essere meglio descritto come una collezione di robot: piccoli cubi (è un fattore di forma popolare) dotati di ruote e magneti che possono connettersi tra loro e cooperare quando uno o tutti non lo faranno Fai il lavoro. Il cervello dell'operazione giace in un'unità centrale equipaggiata con una fotocamera e un sensore di profondità che utilizza per ispezionare l'ambiente circostante e decidere cosa fare.
Se sembra un po 'familiare, è perché lo stesso team ha dimostrato un aspetto diverso di questo sistema all'inizio di quest'anno, vale a dire la capacità di identificare gli spazi che non può navigare e distribuire gli elementi per rimediare a ciò. Il documento attuale è incentrato sul sistema sottostante che il robot usa per percepire ciò che lo circonda e interagire con esso.
Mettiamolo in termini più concreti. Supponiamo che un robot come questo abbia l'obiettivo di raccogliere le scarpe da casa e riporle nell'armadio. Mette bene in giro il tuo appartamento ma alla fine identifica una scarpa da tiro che si trova sotto il tuo letto. Sa che è troppo grande per stare lì sotto perché può percepire le dimensioni e comprende la propria forma e dimensione. Ma sa anche che ha delle funzioni per accedere alle aree chiuse e può dire che disponendo le sue parti in modo tale che dovrebbe essere in grado di raggiungere la scarpa e riportarla indietro.
La flessibilità di questo approccio e la capacità di prendere queste decisioni in modo autonomo sono quelle in cui la carta identifica i progressi. Questa non è una stretta funzione "scarpa sotto il letto", è uno strumento generale per accedere alle aree in cui il robot non può adattarsi, sia che questo significhi premere un pulsante incassato, sollevare una tazza che si trova su un lato, o raggiungere tra i condimenti per afferrarne uno nella parte posteriore.
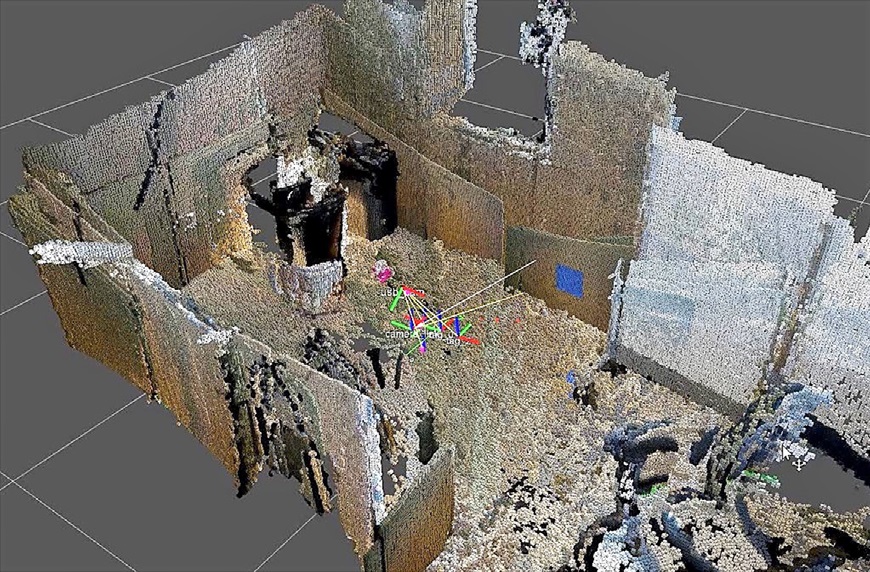
Come per qualsiasi cosa in robotica, questo è più difficile di quanto suoni e non sembra nemmeno facile. Il "cervello" deve essere in grado di riconoscere gli oggetti, misurare accuratamente le distanze e comprendere fondamentalmente le relazioni fisiche tra gli oggetti. Nella situazione di afferrare la scarpa qui sopra, cosa sta impedendo a un robot di cercare di sollevare il letto e di lasciarlo in posizione fluttuando sopra il terreno mentre guida sotto? Le intelligenze artificiali non hanno alcuna comprensione intrinseca di alcun concetto di base e così tante devono essere codificate o algoritmi creati che fanno in modo affidabile la scelta giusta.
When you subscribe to the blog, we will send you an e-mail when there are new updates on the site so you wouldn't miss them.
By accepting you will be accessing a service provided by a third-party external to http://imperoweb.it/

Non è ammessa nessuna copia i contenuti sono protetti da diritti d'autore.