





loading...
Ciò è dovuto in parte al fatto che una mano meccanica deve essere in grado di regolare la forza che sta applicando molto rapidamente al volo, e questo di solito comporta una sorta di trasmissione variabile o rapporto di trasmissione dinamico. Ma Kevin O'Brien ei suoi colleghi hanno sviluppato un nuovo modo per far sì che il motore regoli la sua velocità e forza senza utilizzare centinaia di componenti lavorati a macchina. In effetti, esso e la mano che aziona possono essere quasi interamente stampati in 3D.
Funziona così: le dita della mano sono controllate, come molte altre di queste mani e, in effetti, le nostre, da corde flessibili che scorrono lungo le loro lunghezze. Queste cordicelle possono essere serrate o allentate per fare in modo che le dita prendano posizioni diverse, e spesso ciò avviene facendo in modo che una bobina tocchi il gioco o lo distribuisca. È questa bobina che deve muoversi con precisione ed è il punto finale del complesso sistema di ingranaggi sopra menzionato in altre mani.
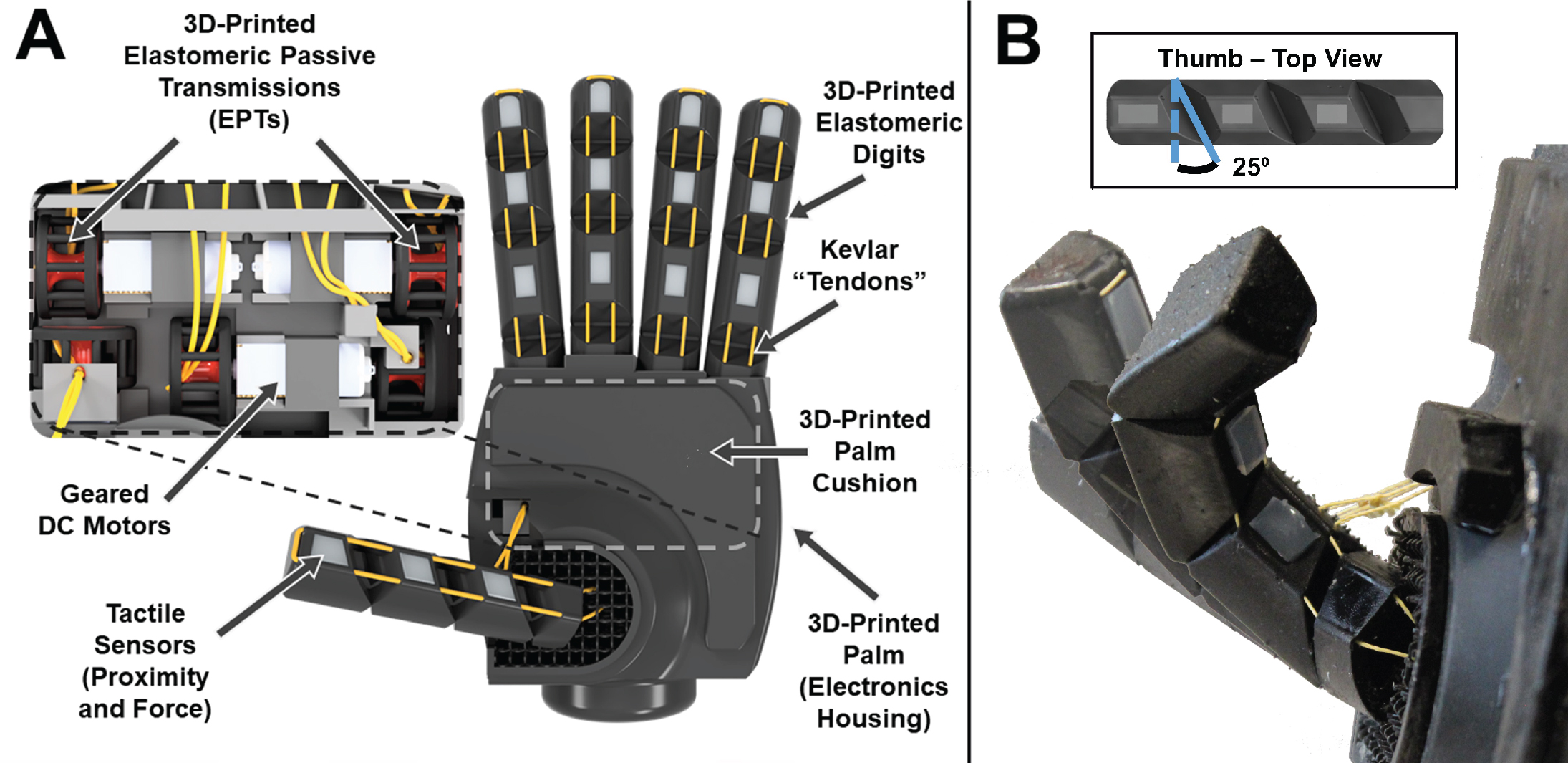
Ma nella mano ADEPT (pilotata in modo adattivo tramite trasmissioni passive elastomeriche - continueremo con l'acronimo) queste bobine hanno nei loro centri un nucleo cilindrico flessibile, la cui forma può essere modificata stringendo un "tendine" separato attorno ad esso. Quando il tendine è allentato, il nucleo è più largo e gira rapidamente, producendo movimenti rapidi e reattivi. Quando il tendine viene serrato, il nucleo viene ridotto di raggio e corrispondentemente aumenta di coppia mentre diminuisce in velocità.
Non c'è cambio di marcia, niente ingranamento dei denti - se la mano determina che è necessario un po 'più di coppia per tenere qualcosa, può farlo stringendo il tendine solo un po'. E non appena ha bisogno di rilasciare rapidamente o prendere qualcosa, il tendine può allentarsi e le dita si muovono rapidamente e leggermente.
Questa semplicità e la facilità di produzione rendono questo molto più economico rispetto ad altre opzioni, mentre offre ancora una grande versatilità e reattività.
"I vantaggi dei sistemi di trasmissione elastomerica sono che possono essere stampati in 3D rapidamente (50 all'ora), a basso costo (<$ 1 per parte) e in molti fattori di forma compatti", hanno scritto i ricercatori. Stanno valutando una mano intera per meno di $ 500.
Sfortunatamente i materiali non sono ancora all'altezza del compito - la parte che ha costantemente la sua forma regolata tende a degradarsi, anche se sono riusciti a portarla al punto in cui poteva essere regolata circa 25.000 volte prima di fallire (non catastroficamente, solo non sta facendo abbastanza bene il suo lavoro). Può sembrare molto, ma le tue dita si muovono molto. Quindi c'è ancora del lavoro da fare prima che questo sia un sostituto realistico per altre parti meccaniche.
Tuttavia, è un approccio promettente e abbastanza generale da poter essere utilizzato anche su gambe artificiali, braccia e tute da lavoro. Puoi leggere di più su Science Robotics.
When you subscribe to the blog, we will send you an e-mail when there are new updates on the site so you wouldn't miss them.
By accepting you will be accessing a service provided by a third-party external to http://imperoweb.it/

Non è ammessa nessuna copia i contenuti sono protetti da diritti d'autore.